






針對此,筆者近日特意做了一個小調查:我們卡爾德柔性電纜是一家專業研發生產拖鏈電纜、機器人電纜、伺服電纜的工業控制電纜的科技型企業,本身的客戶就是一些工業機器人生產研發企業或者應用企業,按理說我們卡爾德電纜的員工對于工業機器人的了解相對于其他行業的從業者而言是了解的比較多的,而實際上,通過筆者的調查,雖然說我們卡爾德的員工對于工業機器人有一定了解,比如說也知道六軸機器人有分為機器人本體,機器人控制柜等等這些。但是詳細到什么是機器人本體,什么是機器人控制柜等等,還是不能說出一個一二三來。
不過,沒關系,知之為知之,不知為不知,現在不知道,那我們就一起來了解工業機器人由哪些組成,還有工業機器人的工作原理等等這些吧!
為了讓大家對于工業機器人的組成有一個清晰的認識,下面我給大家采用圖文并茂的形式給大家闡述:

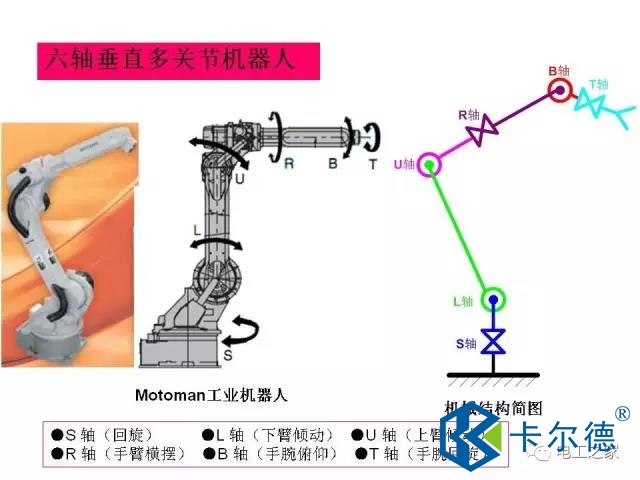







通過上面這些圖文,我相信大家對于工業機器人的組成已經有了比較感官的認識了吧。如果還想親身體驗或者感受工業機器人,尤其是6軸機器人的,建議大家可以去觀展一些比較大型的機器人展會,展會上都會有機器人展示的,也會有專人給您做介紹。
了解完了工業機器人的組成,那么跟著我們卡爾德柔性電纜來了解工業機器人的工作原理!
二、工業機器人工作原理與技術參數
1、機器人的工作原理
機器人的工作原理是一個比較復雜的問題。簡單地說,機器人的原理就是模仿人的各種肢體動作、思維方式和控制決策能力。從控制的角度,機器人可以通過如下四種方式來達到這一目標。
“示教再現”方式:它通過“示教盒”或人“手把手”兩種方式教機械手如何動作,控制器將示教過程記憶下來,然后機器人就按照記憶周而復始地重復示教動作,如噴涂機器人。
“可編程控制”方式:工作人員事先根據機器人的工作任務和運動軌跡編制控制程序,然后將控制程序輸入給機器人的控制器,起動控制程序,機器人就按照程序所規定的動作一步一步地去完成,如果任務變更,只要修改或重新編寫控制程序,非常靈活方便。大多數工業機器人都是按照前兩種方式工作的。
“遙控”方式:由人用有線或無線遙控器控制機器人在人難以到達或危險的場所完成某項任務。如防暴排險機器人、軍用機器人、在有核輻射和化學污染環境工作的機器人等。
“自主控制”方式:是機器人控制中最高級、最復雜的控制方式,它要求機器人在復雜的非結構化環境中具有識別環境和自主決策能力,也就是要具有人的某些智能行為。
示教再現
–示教-再現 即分為示教-存儲-再現-操作四步進行。
•示教:方式有兩種
(1) 直接示教-手把手;
(2) 間接示教-示教盒控制。
•存儲:保存示教信息。•再現:根據需要,讀出存儲的示教信息向機器人發出重復動作的命令。
控制信息
•順序信息:各種動作單元(包括機械手和外圍設備)按動作先后順序的設定、檢測等。
•位置信息:作業之間各點的坐標值,包括手爪在該點上的姿態,通常總稱為位姿(POSE)。
•時間信息:各順序動作所需時間,即機器人完成各個動作的速度。

2、工業機器人的技術參數
表示機器人特性的基本參數和性能指標主要有工作空間、自由度、有效負載、運動精度、運動特性、動態特性等。
(1)工作空間(Work space) 工作空間是指機器人臂桿的特定部位在一定條件下所能到達空間的位置集合。工作空間的性狀和大小反映了機器人工作能力的大小。理解機器人的工作空間時,要注意以下幾點:
(2)有效負載(Payload) 有效負載是指機器人操作機在工作時臂端可能搬運的物體重量或所能承受的力或力矩,用以表示操作機的負荷能力。
(3)運動精度(Accurucy) 機器人機械系統的精度主要涉及位姿精度、重復位姿精度、軌跡精度、重復軌跡精度等。
(4)運動特性(Sped) 速度和加速度是表明機器人運動特性的主要指標。
(5)動態特性 結構動態參數主要包括質量、慣性矩、剛度、阻尼系數、固有頻率和振動模態。
工作精度

重復性(Repeatability)或重復精度:指機器人重復到達某一目標位置的差異程度。或在相同的位置指令下,機器人連續重復若干次其位置的分散情況。它是衡量一列誤差值的密集程度,即重復度。






















卡爾德柔性電纜溫馨提示:拖鏈電纜、耐折電纜、機器人電纜、伺服電纜、直線電機電纜推薦源至德國的卡爾德電纜!質量有保障!


 粵公網安備 44190002002147號
粵公網安備 44190002002147號